
Samstag, 2. November 2013
Weiche Ware
schultzc, 16:44h
Crawlee soll so weit wie möglich auf ROS aufbauen. ROS ist eine Sammlung von Linux-Paketen, die als Zwischenschicht einige Services für Roboter anbietet. In der ROS-Welt gibt es eine beliebige Anzahl an Nodes (Achtung: Ab hier werde ich mich bestem Denglisch bedienen - ja, noch (viel) mehr als vorher…), die die eigentliche Arbeit erledigen. Diese können sich miteinander über so genannte Topics und Services unterhalten.
Dabei sind Topics eine Art Broadcasting-System. Ein Node kann Daten zu einem Topic publishen und alle Nodes, die sich für dieses Topic interessieren, können dieses Topic subscriben und erhalten von da an die Daten übermittelt. Services hingegen sind eine Art Remote-Procedure-Call-Verfahren (RPC) und ermöglichen es Befehle an Nodes zu übermitteln.
Intern gibt es sicher Unterschiede in der Implementierung, mit etwas Abstand verschwimmen die Einsatzgebiete für Topics und Services aber an vielen Stellen. Als Beispiel könnte man einen Node, der die Bewegung kontrolliert, nennen. Ist ein Bewegungsbefehl ein Topic oder doch ein Service des Nodes?
Ich werde zunächst einmal versuchen Services nur zur Kontrolle/Konfiguration der Nodes zu benutzen. Sprich um den Zustand/State des Nodes zu verändern. Für die Datenübermittelung (und Bewegungsbefehle sind imho keine State-Änderung) werde ich daher auf Topics zurückgreifen.
Natürlich kann man sich fragen, ob es nicht bereits ausreichend verschiedene Datentransfer und RPC-Mechanismen in Linux selbst gibt, und es eines ROS Aufsatzes wirklich bedarf… In meinen Augen gibt es auch da keine klare Antwort zu, aber der ROS Ansatz hat eine viel wichtigere Funktion, als das reine Angebot von Low-Level Services:
Standardisierung!
Der wirklich große Vorteil ist am Ende, dass man streng eingekapselte Module für ROS-Roboter bauen kann. Publizieren oder subscriben sie zu den richtigen Topics, kann man sie mit bestehenden Nodes zusammenarbeiten lassen, ohne irgendwelche zusätzlichen Interfaces zu programmieren, oder in den Code der bestehenden Nodes einzugreifen.
Um ROS nun auf meinen selbstgebauten Roboter anwenden zu können, benötige ich zunächst eine neue Zwischenschicht, zwischen der PR6 Hardware und dem Linux Betriebssystem. Das führt zu der folgenden Architektur.

Dabei werde ich in einem ersten Schritt zwei neue Softwares programmieren, die ich als Firmware (Software, die auf dem Atmega32 läuft und dabei unter keinem Betriebssystem) und Driver (ein Linux Programm, dass die FW Funktionen unter Linux/ROS zur Verfügung stellt) bezeichne. Der Driver wird dabei kein echter "Linux Treiber" werden, sondern ein reguläres Linux Programm im User-Space. Da ich auf keine HW Funktionen des EeePC zugreifen möchte, sondern lediglich über mein USB-2-UART kommunizieren mag, ist das ausreichend. Dazu aber ein anderes Mal mehr.
Dabei sind Topics eine Art Broadcasting-System. Ein Node kann Daten zu einem Topic publishen und alle Nodes, die sich für dieses Topic interessieren, können dieses Topic subscriben und erhalten von da an die Daten übermittelt. Services hingegen sind eine Art Remote-Procedure-Call-Verfahren (RPC) und ermöglichen es Befehle an Nodes zu übermitteln.
Intern gibt es sicher Unterschiede in der Implementierung, mit etwas Abstand verschwimmen die Einsatzgebiete für Topics und Services aber an vielen Stellen. Als Beispiel könnte man einen Node, der die Bewegung kontrolliert, nennen. Ist ein Bewegungsbefehl ein Topic oder doch ein Service des Nodes?
Ich werde zunächst einmal versuchen Services nur zur Kontrolle/Konfiguration der Nodes zu benutzen. Sprich um den Zustand/State des Nodes zu verändern. Für die Datenübermittelung (und Bewegungsbefehle sind imho keine State-Änderung) werde ich daher auf Topics zurückgreifen.
Natürlich kann man sich fragen, ob es nicht bereits ausreichend verschiedene Datentransfer und RPC-Mechanismen in Linux selbst gibt, und es eines ROS Aufsatzes wirklich bedarf… In meinen Augen gibt es auch da keine klare Antwort zu, aber der ROS Ansatz hat eine viel wichtigere Funktion, als das reine Angebot von Low-Level Services:
Standardisierung!
Der wirklich große Vorteil ist am Ende, dass man streng eingekapselte Module für ROS-Roboter bauen kann. Publizieren oder subscriben sie zu den richtigen Topics, kann man sie mit bestehenden Nodes zusammenarbeiten lassen, ohne irgendwelche zusätzlichen Interfaces zu programmieren, oder in den Code der bestehenden Nodes einzugreifen.
Um ROS nun auf meinen selbstgebauten Roboter anwenden zu können, benötige ich zunächst eine neue Zwischenschicht, zwischen der PR6 Hardware und dem Linux Betriebssystem. Das führt zu der folgenden Architektur.
Dabei werde ich in einem ersten Schritt zwei neue Softwares programmieren, die ich als Firmware (Software, die auf dem Atmega32 läuft und dabei unter keinem Betriebssystem) und Driver (ein Linux Programm, dass die FW Funktionen unter Linux/ROS zur Verfügung stellt) bezeichne. Der Driver wird dabei kein echter "Linux Treiber" werden, sondern ein reguläres Linux Programm im User-Space. Da ich auf keine HW Funktionen des EeePC zugreifen möchte, sondern lediglich über mein USB-2-UART kommunizieren mag, ist das ausreichend. Dazu aber ein anderes Mal mehr.
... link (0 Kommentare) ... comment
Freitag, 1. November 2013
Darf ich vorstellen - Crawlee Nummer 0
schultzc, 18:28h
Nachdem ich in dem letzten Eintrag grob die Anwendungsfälle und Anforderungen, die sich daraus ableiten, umrissen habe, möchte ich heute das Grundkonzept meiner Prototyping-Plattform skizzieren.
Für den ersten Prototypen möchte ich möglichst wenig Geld investieren und gleichzeitig möglichst wenig Zeit. Dementsprechend werde ich auf so viele vorhandene oder einfach zu besorgende Komponenten wie möglich zurückgreifen.
Die Hardware
Die Hardware von Crawlee #0 wird aus 2 Teilsystemen bestehen. Als mobile Grundplattform werde ich den bei Conrad erhältlichen Roboter RP6 V2 verwenden. Dabei handelt es sich um einen kleinen Roboter mit fest gelagertem Kettenantrieb, einigen einfachen Sensoren und einem Atmega32 Mikrocontroller. Der PR6 enthält damit schon einmal fast alle Grundkomponenten, die ich für Crawlee #0 benötige. Um dem Atmega32 einen leistungsstarken Zentralcomputer zur Seite zu stellen, habe ich einen alten Asus EeePC R101D ausgewählt. Da nicht besonders viele Daten zwischen RP6 und EeePC übertragen werden müssen, werde ich als Schnittstelle ein einfaches UART verwenden.
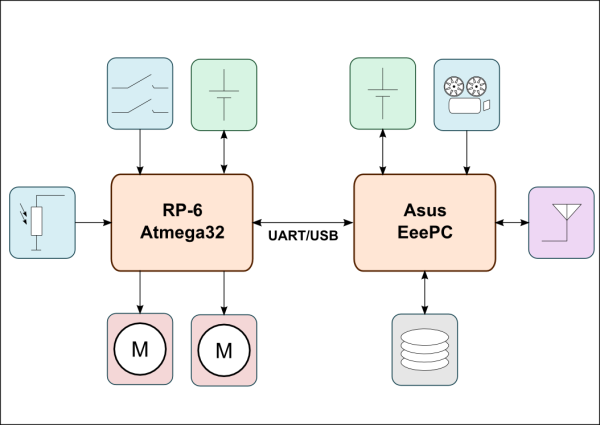
Dadurch, dass der RP6 bereits eine einfache FW enthält, die die Sensoren und Motoren kontrollieren und auslesen kann, ist an dieser Stelle nicht viel zu tun.
Der EeePC auf der anderen Seite ergänzt den RP6 mit einer Kamera, einer Festplatte, WiFi und natürlich einem vergleichsweise zu Höchstleistungen fähigen Prozessor. Ich habe bereits vor einiger Zeit eine Ubuntu Linux Version installiert, so dass ich auch diese Systemkomponenten ohne großen Aufwand verwenden kann.
Um das Gesamtsystem zusammenzusetzen, muss folglich nur noch die UART-2-USB Schnittstelle programmiert werden und danach kann ich mich auf die Software Seite Crawlees konzentrieren.
Für den ersten Prototypen möchte ich möglichst wenig Geld investieren und gleichzeitig möglichst wenig Zeit. Dementsprechend werde ich auf so viele vorhandene oder einfach zu besorgende Komponenten wie möglich zurückgreifen.
Die Hardware
Die Hardware von Crawlee #0 wird aus 2 Teilsystemen bestehen. Als mobile Grundplattform werde ich den bei Conrad erhältlichen Roboter RP6 V2 verwenden. Dabei handelt es sich um einen kleinen Roboter mit fest gelagertem Kettenantrieb, einigen einfachen Sensoren und einem Atmega32 Mikrocontroller. Der PR6 enthält damit schon einmal fast alle Grundkomponenten, die ich für Crawlee #0 benötige. Um dem Atmega32 einen leistungsstarken Zentralcomputer zur Seite zu stellen, habe ich einen alten Asus EeePC R101D ausgewählt. Da nicht besonders viele Daten zwischen RP6 und EeePC übertragen werden müssen, werde ich als Schnittstelle ein einfaches UART verwenden.
Dadurch, dass der RP6 bereits eine einfache FW enthält, die die Sensoren und Motoren kontrollieren und auslesen kann, ist an dieser Stelle nicht viel zu tun.
Der EeePC auf der anderen Seite ergänzt den RP6 mit einer Kamera, einer Festplatte, WiFi und natürlich einem vergleichsweise zu Höchstleistungen fähigen Prozessor. Ich habe bereits vor einiger Zeit eine Ubuntu Linux Version installiert, so dass ich auch diese Systemkomponenten ohne großen Aufwand verwenden kann.
Um das Gesamtsystem zusammenzusetzen, muss folglich nur noch die UART-2-USB Schnittstelle programmiert werden und danach kann ich mich auf die Software Seite Crawlees konzentrieren.
... link (0 Kommentare) ... comment